Figure这次的演示绝对是振奋人心的,遗憾的是国内关注到这个的人员不是特别多
最新资讯
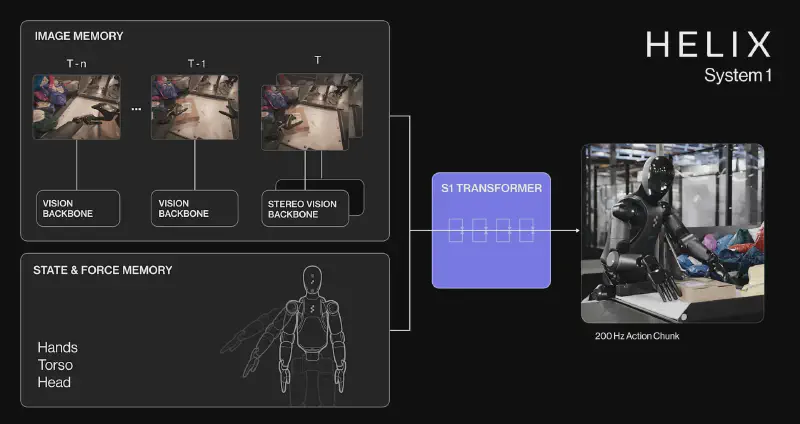
- Figure AI发布其机器人60分钟连续分拣快递视频,扫描准确率由88%提高至约95%,单个包裹处理时间由6.3秒降至4.3秒(演示视频(Twitter), 官网介绍页: https://www.figure.ai/news/scaling-helix-logistics)
- 鑫拓科技发布模块化灵巧手指单元ST-CS-Mini,基于谐波模组,直径约1.2cm(演示地址: https://www.bilibili.com/video/BV1a2TWz9Eac ;官网地址: https://sito.cc/Index)
- 北京大学团队发布VLA双系统架构Fast-in-Slow,将完整VLM的最终转换模块重新用作系统1,同时保留完整模型用于系统2的推理,以实现稳健且响应迅速的动作生成(项目地址: https://fast-in-slow.github.io/)
- 银河通用开源零售场景下的全身遥操作系统OpenWBT,通过Apple Vision Pro与电脑实现小时级快速部署(项目地址: https://github.com/GalaxyGeneralRobotics/OpenWBT ;演示视频)
- Meta发布自监督世界模型V-JEPA 2,基于视频训练并能够在新环境中实现零样本机器人控制(项目地址: https://ai.meta.com/vjepa/ ;文章地址: https://arxiv.org/abs/2506.09985v1)
- 上海创智学院团队发布视触觉数据采集系统FreeTacMan,采用高分辨率触觉传感器和便携式的模块化设计(项目地址: http://opendrivelab.com/blog/freetacman)
- Lumos鹿明机器人发布演示视频,1.6秒内完成直立起身(演示视频(bilibili); 演示视频(YouTube))
- 众擎机器人公开了一项人形机器人直膝行走专利,专利公开号CN120116236A;同时开源了其人形机器人PM01的基础框架和ROS2开发包(专利查询地址: https://pss-system.cponline.cnipa.gov.cn/conventionalSearch ;项目地址: https://github.com/engineai-robotics/engineai_ros2_workspace)
关注的项目
- 一个基于Java Script在网页端直接控制调试飞特舵机的控制面板,测试了STS3215的可行性(项目地址: https://bambot.org/feetech.js ;演示视频)
- 一本Elon Rimon所著的关于传统机器人抓取问题的教材(购买地址(中文版), 购买地址(英文原版))
- 一个集成MuJoCo引擎与ROS的框架,通过模块化插件系统实现仿真扩展,支持被动力控、传感器处理等四类回调(文章地址: https://ieeexplore.ieee.org/document/10979045)
- 一个由清华大学团队发布的开源视触觉传感器9DTact(项目地址: https://linchangyi1.github.io/9DTact/)
- 一个基于Arduino Nano的开源桌面级机器人Otto DIY(项目地址: https://www.ottodiy.com/)
- 一篇总结机器人手腕传动的知乎文章(文章地址: https://zhuanlan.zhihu.com/p/13001146232 ;备注: 作者还有一系列关于上肢结构的分析文章,值得一看)