这周张江的人形机器人技能大赛没能看到眼前一亮的东西,偶然想到楼天城曾说过今年的具身智能就像2018年的自动驾驶,下一年将会是真正的淘汰赛,不知人形厂商还能还能在王婆卖瓜、歌舞升平的氛围中维持多久
最新资讯
- ETH团队提出基于强化学习的统一控制策略,用于控制腿式移动机器人精准击打羽毛球(文章地址: https://www.science.org/doi/10.1126/scirobotics.adu3922 ; 演示视频(YouTube))
- 国家地方共建人形机器人创新中心发布7B生成式人形机器人运动大模型MindLoongGPT,同步发布全身运动数据集与全工具链,支持text2motion, motion2text, motion2motion多任务
- 傲意科技推出具备触觉感知的第二代灵巧手ROH-AP001和小型机器人专用灵巧手ROH-LiteS,分别针对力度自适应需求和小型化应用场景(官网链接: https://www.oymotion.com/product61 ;备注: 产品页暂未上线)
- 灵巧智能发布千元级8自由度三指灵巧手DexHand021 S,采用齿轮-腱绳-连杆三模传动,通过视触觉伺服联动实现力控自适应抓握(产品页面: https://www.dex-robot.com/en/dexhand021S)
- Hugging Face发布开源人形机器人HopeJr,成本约$3000,目前可接受预订(项目地址: https://github.com/TheRobotStudio/HOPEJr ;演示视频(Twitter))
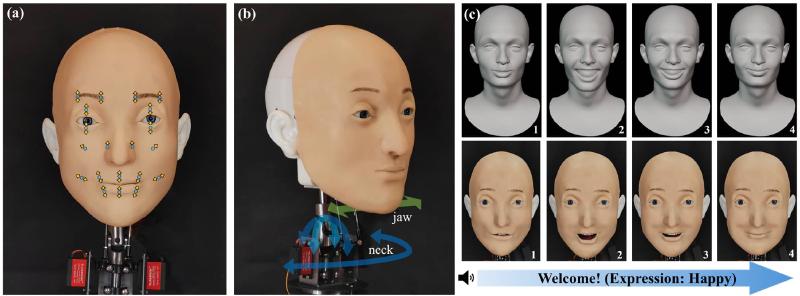
- 清华大学团队发布混合驱动的仿生机器人面部平台Morpheus,可由任意给定的句子生成不同的情绪表达并通过映射生成面部表情(项目地址: https://jiawenyang-ch.github.io/Morpheus-Hardware-Design/)
- 银河通用发布端到端VLA大模型TrackVLA,纯视觉环境感知并具备零样本(Zero-Shot)泛化能力,已实现真实城市环境中的自主移动(演示地址: https://www.bilibili.com/video/BV1tY7uzYEbq ;项目地址: https://pku-epic.github.io/TrackVLA-web/)
- 北京大学团队发布多模态手部运动生成框架MEgoHand,能够精确建模细粒度的手部关节结构,并在各种场景下实现稳健泛化(项目地址: https://beingbeyond.github.io/MEgoHand/)
- Zerith零次方发布轮式人形机器人Zerith-H1及操作模型Zerith-V0,借鉴自动驾驶"锁定场景-泛化背景"模式,演示酒店卫生间清洁等类家庭服务场景任务(演示视频: https://www.bilibili.com/video/BV19kjiz7Ebw)
关注的项目
- 一期关于人形机器人全身控制的技术研讨会(ARTS Webinar),介绍了HOMIE与GRUtopia相关工作(视频地址: https://www.bilibili.com/video/BV1v2jJz6EJb)
- 一个用于处理机器人G代码刀具路径的Python包PyRoboPath(项目地址: https://github.com/alexarbogast/pyrobopath)
- 一款开源的FOC驱动器,除基本功能外衍生出了旋钮模式和双驱动板同步控制功能(演示地址; 硬件部分, 软件部分)
- 一个拆解智元OmniPicker的视频,分析了装配和PCB方面的缺陷,该自适应夹爪使用了伺泰威4310电机(视频地址: https://www.bilibili.com/video/BV1isryYfEgL)
- 一款由Reazon HI Lab推出的开源7自由度双臂平台,成本约$2500,支持Gazebo, MuJoCo, Genesis等平台仿真环境下训练(项目地址: https://open-arm.org/ ;文档地址: https://github.com/reazon-research/OpenArm)
- 逐际动力发布其双足机器人TRON 1随机高动态测试演示视频,放置在70km/h、最大1G加速度的高速货车尾舱中应对高动态扰动(演示地址: https://www.bilibili.com/video/BV1AajkzJErG)