Latest News
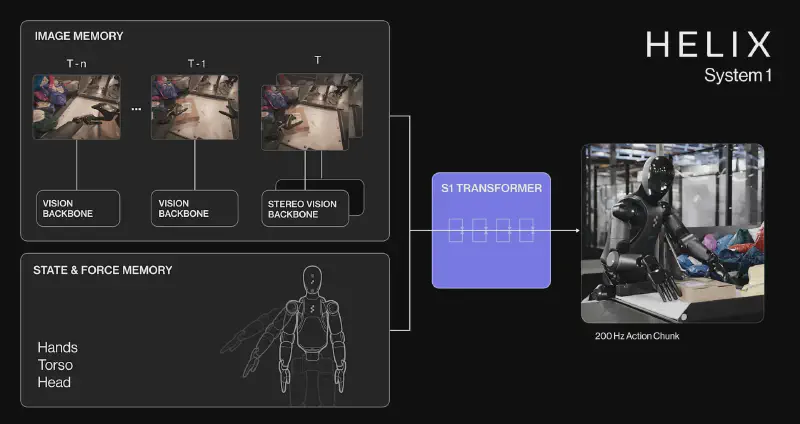
- Figure AI released a 60-minute continuous parcel sorting demo video, where scanning accuracy improved from 88% to ~95%, and the average handling time per package was reduced from 6.3 seconds to 4.3 seconds (Demo link(Twitter), blog page: https://www.figure.ai/news/scaling-helix-logistics).
- SITO Technology (鑫拓科技) released a modular dexterous finger unit, ST-CS-Mini, based on a harmonic gear module with a diameter of approximately 1.2 cm (Demo link: https://www.bilibili.com/video/BV1a2TWz9Eac ;product page: https://sito.cc/Index).
- A team from Peking University introduced Fast-in-Slow, a dual-system VLA architecture that reuses the final transformer block of a complete VLM as System 1 while retaining the full model for System 2 inference to enable robust and responsive motion generation (Project link: https://fast-in-slow.github.io/).
- Galbot open-sourced OpenWBT, a full-body teleoperation system for retail scenarios. It supports hour-level deployment via Apple Vision Pro and a PC (Project link: https://github.com/GalaxyGeneralRobotics/OpenWBT ;demo link).
- Meta released a self-supervised world model, V-JEPA 2, trained on video data to achieve zero-shot robotic control in unseen environments (Project link: https://ai.meta.com/vjepa/ ;paper link: https://arxiv.org/abs/2506.09985v1).
- A group from Shanghai Innovation Institute introduced FreeTacMan, a visuo-tactile data collection system featuring high-resolution tactile sensors and a portable modular design (Project link: http://opendrivelab.com/blog/freetacman).
- Lumos Robotics published a demo where its humanoid robot achieves a standing-up motion in just 1.6 seconds (Demo link(bilibili); demo link(YouTube)).
- EngineAI Robotics announced a patent (CN120116236A) on straight-knee humanoid walking and open-sourced the basic framework and ROS2 workspace of its humanoid robot PM01 (Patent search link: https://pss-system.cponline.cnipa.gov.cn/conventionalSearch ;project link: https://github.com/engineai-robotics/engineai_ros2_workspace).
Featured Projects
- A JavaScript-based control panel that allows direct web-based debugging of Feetech servo motors, tested on STS3215 (Project link: https://bambot.org/feetech.js ;demo video).
- A textbook on classic robotic grasping problems by Elon Rimon (Chinese version, English version).
- A framework integrating the MuJoCo engine with ROS, featuring a modular plugin system that supports four types of callbacks including impedance control and sensor processing (Paper link: https://ieeexplore.ieee.org/document/10979045).
- 9DTact, an open-source visuo-tactile sensor developed by a group from Tsinghua University (Project link: https://linchangyi1.github.io/9DTact/).
- Otto DIY, an open-source desktop robot based on Arduino Nano (Project link: https://www.ottodiy.com/).
- A Zhihu article summarizing different robotic wrist transmission mechanisms (Article link: https://zhuanlan.zhihu.com/p/13001146232 ;Note: The author also has a series of insightful articles on upper-limb mechanisms.).