Latest News
- A team from ETH Zurich has proposed a unified reinforcement learning-based control strategy for precisely hitting badminton shots with legged mobile robots (Paper link: https://www.science.org/doi/10.1126/scirobotics.adu3922 ; Demo link(YouTube)).
- The National Humanoid Robot Innovation Center (国家地方共建人形机器人创新中心) has released MindLoongGPT, a 7B generative large model for humanoid motion. It comes with a full-body motion dataset and toolchain, supporting multiple tasks including text2motion, motion2text, and motion2motion.
- OYMotion has introduced two new dexterous hands: ROH-AP001, a second-generation hand with tactile sensing for adaptive force control; ROH-LiteS, a compact version designed for small-scale robots(Official website: https://www.oymotion.com/product61 ;Note: Related product pages are not yet online).
- DexRobot has launched DexHand021 S, a three-finger, 8-DOF dexterous hand priced around 1,000 RMB. It features a gear–tendon–linkage hybrid transmission and supports force-adaptive grasping via visual-tactile servo control (Product page: https://www.dex-robot.com/en/dexhand021S).
- Hugging Face has unveiled the open-source humanoid robot HopeJr, with an estimated cost of ~$3000. Pre-orders are now open (Project link: https://github.com/TheRobotStudio/HOPEJr ;Demo link(Twitter)).
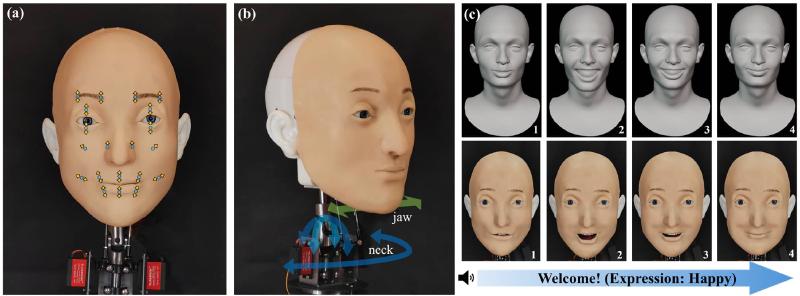
- A team from Tsinghua University has introduced Morpheus, a hybrid-actuated bionic facial platform capable of generating emotional expressions from input sentences (Project link: https://jiawenyang-ch.github.io/Morpheus-Hardware-Design/).
- Galbot has released TrackVLA, an end-to-end VLA large model with zero-shot generalization capabilities in real-world city navigation (Demo link: https://www.bilibili.com/video/BV1tY7uzYEbq ;project link: https://pku-epic.github.io/TrackVLA-web/).
- A team from Peking University has introduced MEgoHand, a multimodal hand motion generation framework that precisely models fine-grained joint structures and generalizes robustly across various scenarios (Project link: https://beingbeyond.github.io/MEgoHand/).
- Zerith Robotics has unveiled its wheeled humanoid robot Zerith-H1 and its control model Zerith-V0, drawing inspiration from the “scene to background” paradigm used in autonomous driving. The demo showcases tasks in household service scenarios, such as cleaning a hotel bathroom (Demo link: https://www.bilibili.com/video/BV19kjiz7Ebw).
Featured Projects
- A webinar session from ARTS Webinar focusing on whole-body control of humanoid robots, featuring discussions on HOMIE and GRUtopia (Video link: https://www.bilibili.com/video/BV1v2jJz6EJb).
- PyRoboPath, a Python package for processing robot G-code tool paths (Project link: https://github.com/alexarbogast/pyrobopath).
- An open-source FOC (Field-Oriented Control) driver board with extra features like knob control mode and dual-board synchronization (Demo link; Hardware, Software).
- A teardown analysis of Agibot’s OmniPicker adaptive gripper, examining assembly and PCB design flaws. The gripper uses SITAWELL 4310 motors(Video link: https://www.bilibili.com/video/BV1isryYfEgL).
- OpenArm, an open-source 7-DOF dual-arm platform by Reazon HI Lab, costing around $2500. It supports training in simulators like Gazebo, MuJoCo, and Genesis (Project link: https://open-arm.org/ ;Docs: https://github.com/reazon-research/OpenArm).
- LimX Dynamics released a demo video of its biped robot TRON 1 undergoing high-dynamic testing. It was placed inside a cargo truck traveling at 70 km/h with up to 1G acceleration to simulate extreme dynamic disturbances (Demo link: https://www.bilibili.com/video/BV1AajkzJErG).