Latest News
- 云深处发布山猫M20系列机器人,为其首款专为复杂地形和危险环境打造的中型行业应用轮足机器人(官方链接: https://www.deeprobotics.cn/robot/index/lynx.htm)
- 腾讯RoboticsX实验室发布其VLA框架的最新进展,可部署在腾讯Max与宇树Go2两款机器狗上(文章链接: https://mp.weixin.qq.com/s/LIXALvJVL6h92iGPKxhjnA)
- Lerobot发布SO-101,针对排线和电机进行了优化,同时支持NVIDIA Robotics Toolkit(项目地址: https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#getting-your-own-so101)
- Hugging Face宣布于6月14日至15日举办LeRobot Worldwide Hackathon 2025,线上线下全球同步(新闻链接: https://huggingface.co/LeRobot-worldwide-hackathon)
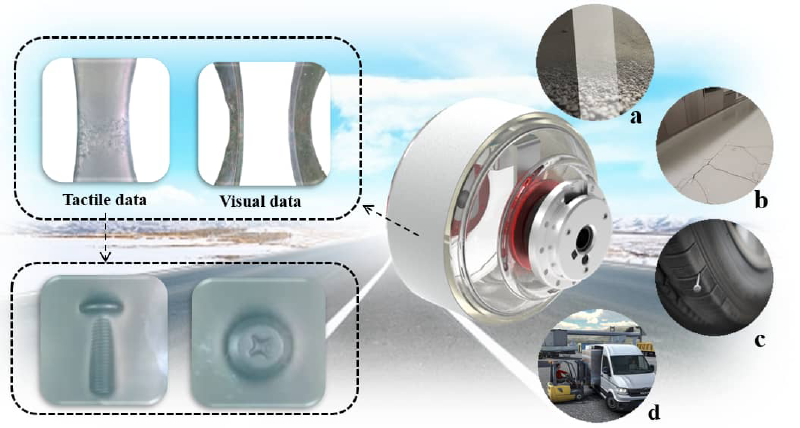
- 清华大学团队推出能够感知地面状况的双模态智能轮胎VTire,可用于提升轮式机器人和车辆的运动稳定性(论文地址: https://arxiv.org/abs/2504.19194 ,数据集地址: https://sites.google.com/view/vtire)
- 华人留学生发布的开源项目XLeRobot,底座采用IKEA RÅSKOG小推车,针对移动性、电源等问题进行了优化(项目地址: https://github.com/Vector-Wangel/XLeRobot)
- 德勤中国与普渡机器人联合发布《开放性的全栈式智能服务机器人生态》白皮书(新闻链接: https://www2.deloitte.com/cn/zh/pages/energy-and-resources/articles/open-full-stack-intelligent-service-robot-ecosystem.html)
- 数字华夏发布其首款双形态机器人星行侠P01,外形与智元灵犀X1相似,搭载分体式移动底盘(新闻链接: http://www.digit.com.cn/NewsDetail/118.html)
Featured Projects
- DOGlove作者张寒在Techbeat的访谈,介绍了相关工作的细节(视频链接(需注册): https://datayi.cn/w/AovNkjwo ;B站视频链接;项目地址与具体细节我在2月底的周报中介绍过)
- 一个展示机器人与计算机视觉领域学者研究方向的网站RoboRanking(官网: https://roboranking.org/)
- 一个收集整理最新的视觉-语言-动作模型在机器人领域应用的项目Awesome-VLA-Robotics(项目地址: https://github.com/Jiaaqiliu/Awesome-VLA-Robotics)
- 独立开发者陈正翔通过3D打印逆向的宇树机器人关节电机,成本约¥150(视频链接: https://www.bilibili.com/video/BV1sWGizdE8B)
- 清华叉院助理教授赵行在第二届具身智能大会(CEAI2025)上的演讲《从机器人跑酷到全身运动》(讲座视频: https://www.bilibili.com/video/BV1eBZHYzEDc)