Latest News
- 1X Technologies releases NEO Gamma robot demo video targeting home scenarios (Link: https://www.1x.tech/neo ; previously, they also showcased teleoperated cooking demos with Youtuber Nick DiGiovanni).
- EngineAI completes world’s first front flip demonstration with its PM01 humanoid robot—surpassing Boston Dynamics’ backflip in 2017—and previously demoed bipedal walking with highly human-like gait. Other notable Shenzhen-based players include LimX Dynamics for their manipulation works.
- Shanghai AI Lab launches general embodied-intelligence platform GRUtopia 2.0, capable of complex scene construction, navigation, manipulation, and operational control (Project link: https://github.com/OpenRobotLab/GRUtopia)
- AgiBot introduces open-source manipulation simulation data generator AgiBot Digital World (Project link: https://agibot-digitalworld.cn/), offering over 1 million expert trajectories and 180+ object classes for synthetic embodied-AI training.
- Figure AI unveils factory-floor fine-tuned end-to-end demo (“Helix Logistics”), showing vision-language-action control of package sorting and handling at speed via “Sport Mode” acceleration (Link: https://www.figure.ai/news/helix-logistics).
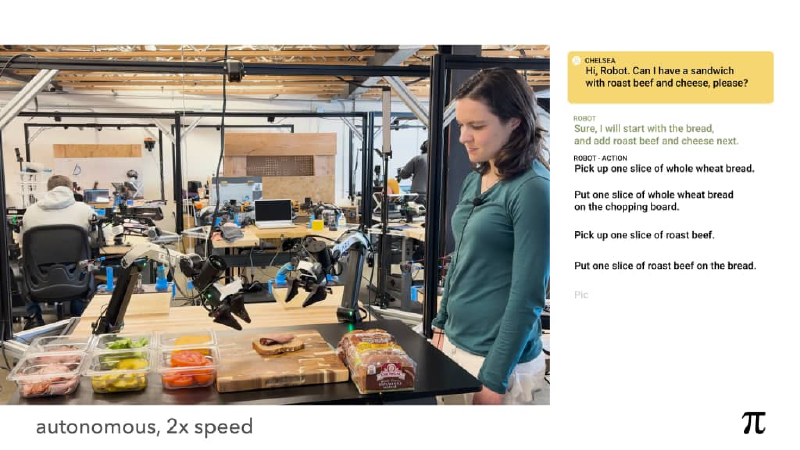
- Physical Intelligence debuts “Hi Robot” interactive demo, where voice input drives the $\pi_0$-based robot to “think aloud” and execute tasks, showcasing an inner-voice VLA architecture (Link: https://www.physicalintelligence.company/research/hirobot).
Featured Projects
- A team from NUS releases Manual2Skill framework, enabling a VLM-driven arm to read furniture assembly manuals and perform zero-part assembly (Paper link: https://arxiv.org/abs/2502.10090).
- A UIUC team open-source their mobile robot platform LeKiwi,supporting integration with LeRobot SO-100 arms (Project link: https://github.com/huggingface/lerobot/blob/main/examples/11_use_lekiwi.md).
- Tsinghua University’s Huazhe Xu group introduces their haptic force feedback glove DOGlove, compatible with CMU’s LEAP Hand for teleoperation and dexterous manipulation (Project link: https://do-glove.github.io/).